


NEARLab is a collaborative research environment where biomedical, robotics, and computer science engineers work together to advance medical imaging, enhance robotic systems, and develop innovative medical robots.
We combine state-of-the-art technologies with innovative methodologies to advance research, collaborating closely with medical centers, industry partners, and academic institutions.
Computer Vision and Predictive Medicine
Advanced image processing algorithms and artificial intelligence models to augment the information from medical images

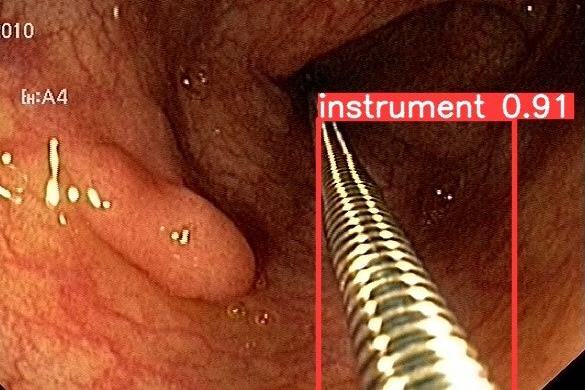
Surgical awareness and endoscopy
By exploiting the stereo capability of endosurgical cameras, we combine procedural disparity maps with modern deep learning models.
From this, we reconstruct the 3D surgical space from the 2D acquisitions in real-time, providing additional levels of information to the practitioner.
TEAM
PROJECTS
Image-guided intra-operative assistance
By exploiting AI methods and learning capabilities, we propose innovative pipeline methods for surgical context awareness.
From this, we obtain additional and innovative information, improving the modern approach to medical imaging.
TEAM
PROJECTS

Predictive Medicine
By integrating medical imaging with clinical data, we exploit advanced deep learning models to extract predictive biomarkers.
From this, we anticipate disease evolution and patient-specific outcomes, supporting more informed and timely interventions.
TEAM
PROJECTS
Contribute to this research line by
Soft and Continuum robotics
Robotized applications for cardiovascular, neurovascular and endoluminal catheterized minimally invasive surgery

Continuum Robot control
By leveraging continuous deformation models and sensing feedback, we integrate advanced control strategies with data-driven approaches.
From this, we regulate the robot configuration in real time, ensuring precision and robustness in unstructured environments.
TEAM
PROJECTS
Augmented Reality in Continuum Robot
By integrating real-time sensing with advanced visualization techniques, we combine continuum robot models with augmented reality frameworks.
From this, we overlay the robot configuration and environment onto the operator’s view, enhancing perception and guidance during task execution.
TEAM
PROJECTS

Contribute to this research line by
Shared Autonomy in Robotics
Algorithms and Framework for an enhanced collaboration paradigm between human and robots in the medical domain
Augmented Reality shared control
By integrating human input with intelligent control algorithms, we combine shared autonomy frameworks with augmented reality interfaces.
From this, we provide real-time visual guidance and feedback, enhancing human-robot collaboration during task execution.
TEAM
PROJECTS


Shared control for assisted neurosurgery
By integrating human input with whole-body control strategies, we combine shared autonomy frameworks with the complex dynamics of humanoid systems.
From this, we enable coordinated and stable motions, enhancing task execution and adaptability in real-world environments.
TEAM
PROJECTS
Human-Robot shared control for Ultrasound Scanning
Ultrasound scanning benefits from a robotized approach in terms of reaching optimal resolution, 3D reconstruction and optimized force control
We embed an ultrasound probe on a robotic arm to execute a scanning procedure more effectively and with better results.
TEAM
PROJECTS


Shared control for humanoid robots
By integrating surgeon input with intelligent control algorithms, we combine shared autonomy frameworks with robotic assistance for neurosurgical procedures.
From this, we enhance precision and stability during critical tasks, supporting safer and more effective interventions.
TEAM
PROJECTS
Autonomous robot control
By integrating real-time perception with planning and control algorithms, we develop autonomous frameworks for robotic systems.
From this, we achieve robust and adaptive behaviors, reducing reliance on human intervention.
TEAM
PROJECTS

Contribute to this research line by

Find Us
NEARLab is located inside the Leonardo Robotics Labs space at Politecnico di Milano, piazza Leonardo da Vinci 32, Building 7, 20133, Milano, Italy
and at Campus Colombo in Via Giuseppe Colombo, 40, 20133 Milano MI
Hours
Monday to Friday: 8.00 A.M. – 20.00 P.M.
More
Website Maintainers
Benjamin Fortuno, Matteo Di Mauro, Alessandra Maria Trapani
Search
Get in touch
or visit the Research Areas and contact the corresponding team directly
Connections
Materials